
文章图片

文章图片
文章图片

文章图片
你戴上VR眼镜挥拳 , 千里之外的机器人精准复制你的动作 , 以人类的速度击打100磅重的沙袋:
这不是科幻场景 , 而是Nadia人形机器人的真实表现 。
近日 , 全球知名研发机构IHMC在YouTube上发布的视频引发热议 。 视频中 , Nadia人形机器人展现出惊人的抗冲击力、平衡性和反应速度 。
细心的观众注意到机器人的新型脚部设计 , 中心可弯曲 , 使动作更接近人类 。 出拳时 , 脚跟轻轻离地 , 仿佛真人般自然 。
网友热评:\"我们离《铁甲钢拳》越来越近了!\"
有人展望未来:\"这可能发展成一项真正的运动 。 机器人可以根据训练数据比赛 , 或由人类远程操控 , 确保安全 。 \"
Nadia代表了人形机器人远程操控技术的最新突破 , 展现了这一领域的未来潜力 。
ㄔ冻滩倏氐奶粽接胪黄菩约际?
人形机器人的远程操控技术 , 在实现操作效率和运动同步方面其实面临诸多挑战 。
传统远程操控中 , 延迟和不透明性(即操作命令传输滞后与机器人动作不一致)是影响操作精度的两大难题 。 尤其是在高强度和高速度的任务中 , 任何微小的延迟都可能导致操控失效 。
为了攻克这些难题 , 研究人员提出了一套全新的解决方案——Nadia人形机器人的高速抗冲击远程操控系统 。
该系统结合了无校准运动捕捉系统、低延迟全身运动传输工具箱以及高速抗冲击的摆线驱动器 , 显著提升了机器人对人类操作的响应速度和抗冲击能力 。
遥操作系统流程图
Nadia机器人实现高效远程操控的背后 , 依赖于三大核心技术:
【热门视频:人形机器人一拳破次元!远程暴打沙袋和乒乓球】简化的运动捕捉与重定向系统:通过仅使用7个惯性测量单元(IMU) , 即可完成用户全身动作的捕捉与机器人动作的对应转换 。 用户只需佩戴虚拟现实(VR)设备和少量传感器 , 无需复杂的校准程序 , 便可实时控制机器人的动作 。
低延迟全身运动传输工具箱(KST):该工具箱通过实时过滤、状态估计与预测技术 , 确保用户的每一个动作都能被快速传输至机器人 , 并以高达1kHz的频率进行动作执行 。 这一技术不仅提升了操控的精确性 , 还通过智能算法减少了动作的滞后感 。
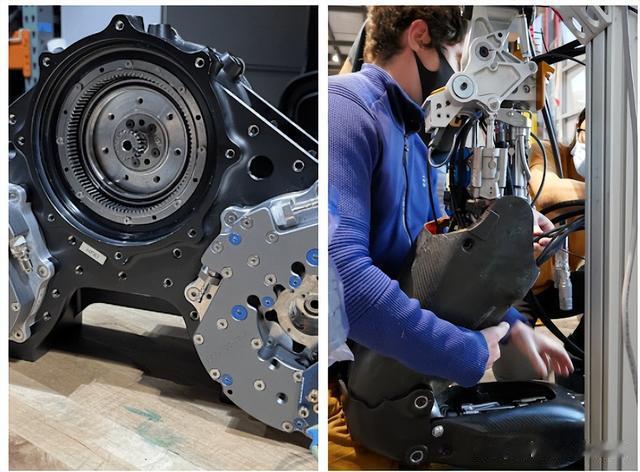
摆线驱动器的应用:Nadia机器人使用的摆线驱动器能够承受高速和冲击环境中的操作 。 这种设计不仅提高了机器人的动作速度 , 还使其在面对外部冲击时依旧保持稳定运作 。
Nadia的摆线执行器和内部齿轮机
机器人手臂中摆线针轮执行器的性能规格 。 该表详细说明了手臂每个关节的运动范围(RoM)、在48V和72V电压下的速度、峰值扭矩和连续扭矩 。
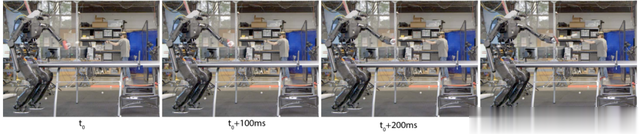
Nadia由配备VR耳机、四个VR跟踪器和两个VR控制器的人类操作员进行远程操作 。 得益于先进的运动学流框架和摆线执行器的集成 , Nadia可以以人类的速度击打100磅重的沙袋 , 展现出惊人的性能 。
∟adia的实验验证与性能展示
为了验证系统的有效性 , 研究团队对Nadia机器人进行了多个实验 。 这些实验不仅验证了Nadia的高速操作性能 , 还展示了其在抗冲击环境中的优越表现 。
在乒乓球实验中 , Nadia与人类对手进行对战 。 实验中机器人需根据球的位置快速调整球拍的方向和角度 , 这对系统的实时性提出了极高要求 。 实验结果表明 , 系统能够在70毫秒内完成动作传输 , 机器人与人类操作者的动作高度同步 。
人形机器人 Nadia 与人类对手打乒乓球
更具挑战性的是打击实验 , Nadia进行了高速打击实验 , 在打击过程中 , 机器人不仅需要快速出拳 , 还需处理与沙袋碰撞后的冲击力 。 摆线驱动器的抗冲击特性在此过程中展现得淋漓尽致 , Nadia的手部动作在碰撞瞬间产生了显著的逆向运动 , 但很快恢复正常 。
人形机器人Nadia击打100磅重的沙袋
这些实验生动地展示了复杂的远程操作系统如何帮助机器人完成困难且实用的任务 。 通过有线连接 , 工程师可以轻松地命令Nadia的手臂和腿部 , VR控制器可以立即将他们的动作转化为机器人的动作 。
机器人左手重复自由挥左拳时的VR输入、预期姿势速度和实际姿势速度的比较
机器人左手执行左勾拳击打沙袋时的VR输入、预期姿势速度和实际姿势速度对比 。
ㄈ嘶鞯男陆?
IHMC开发的Nadia人形机器人系统代表了人机协作领域的一项重要进展 。 这个系统旨在结合人类和机器人的优势 , 以提高整体任务执行效率 。 在这种模式中 , 人类和机器人各自发挥所长:
人类优势: 复杂决策和灵活应对 。 例如在穿越复杂环境时人类操作员可以通过机器人的传感器数据做出最佳路径选择 。
机器人优势: 精确测量和稳定执行 。 Nadia可以在各种环境中提供精确的数据采集和稳定的动作执行 。
Nadia的设计目标是在保持一定自主性的同时 , 允许人类在必要时进行干预 。 这种方法为在非结构化环境中部署机器人提供了一个可行的解决方案 。 IHMC正在研究多种人机交互方式 , 包括传统的计算机界面和更先进的虚拟现实技术 , 以进一步提升协作效率 。
在技术层面 , Nadia采用了电动和液压执行器相结合的混合动力系统 。 其中 , Moog的集成智能执行器(ISA)在系统中发挥了关键作用 。 这种设计旨在优化效率和性能 , 为Nadia在各种复杂环境中的应用提供支持 。
∟adia的广泛应用前景与未来展望
Nadia的潜力远超实验室演示 。 IHMC指出 , 这项技术在消防、灾难响应和危险物品处理等高风险场景中特别有用 。 在灾难救援中 , 救援人员可以安全地远程操控Nadia执行高难度任务 。 在工业领域 , 工人可以通过类似系统完成危险的操作任务 。
医疗领域也可能受益于这项技术 , 比如远程手术 。 在极端环境探索方面 , Nadia可以在深海或太空中进行复杂的科学实验和探索任务 。 多个组织 , 包括NASA和多个军事研究机构 , 对Nadia的开发给予了支持 , 凸显了其广泛的应用潜力 。
展望未来 , 随着相关技术的进一步发展 , Nadia有望在更多复杂环境中展现卓越的操作能力 。 其高速、稳定、抗冲击的特性将在需要快速反应和高效执行的任务中发挥重要作用 。
推荐阅读














- 国产人形机器人突破!教会人形机器人如何像人类一样移动
- 380元的“魔改版”骁龙865盒子,支持4K/60帧视频传输!
- 无论工业机器人还是人形机器人,最终拼的是软件
- 三星手机哪款性价比高?质量好?揭秘六款热门型号,性价比爆棚!
- 新款拯救者Y700上手视频现身,更多详情揭晓
- 六维力矩传感器全线爆发!人形机器人关键传感器,龙头强者恒强
- 一款免费开源的视频编辑软件
- 豆包这玩意谁研究的呢,这视频模型真有点攒劲
- “启江二号”人形机器人亮相 配备多个高精度传感器
- 监听音箱与HiFi音箱区别,热门监听音箱盘点,低音染原声重现