文章图片
文章图片
文章图片
文章图片

文章图片
海底探测作为揭示海洋环境、气候变化及地球演化奥秘的重要途径 , 其重要性日益凸显 。 在这一探索过程中 , 海底采样机器人扮演着举足轻重的角色 , 它们能够精准获取沉积层样品 , 为地质调查、资源探测等多领域研究提供宝贵资料 。 对这些珍贵样品进行深入分析 , 为我们揭开海洋的更多未解之谜提供关键线索 。
然而 , 尽管过去几十年来 , 一些研究机构致力于开发高效的海底沉积层取样机器人 , 但这一领域至今仍未形成完善的体系 。 前不久 , 来自广东工业大学、北京航空航天大学的研究团队为更深入了解当前海底沉积层取样机器人的研究进展 , 就海底沉积层取样机器人的基本概念、历史演变、面临的约束条件、关键技术以及未来的发展趋势等内容进行了全面梳理 , 为这一领域的研究提供了全面而深入的概述 。
图1 论文出版信息
梳理内容的相关成果已以“Progress and Perspective of Seafloor Regolith-Sampling Robots for Ocean Exploration”为题发表在《Journal of Field Robotics》上 。 刘家斌为第一作者 , 叶旻辉、朱海飞、管贻生为共同作者 , 张涛为通讯作者 。
那么 , 海底沉积层取样机器人当前具体发展如何呢?接下来和机器人大讲堂一起深入了解!
ㄊ裁词呛5壮粱闳⊙魅耍?
地球并非一个简单的均质球体 , 而是由多个具有显著差异成分的同心层次构成 。 对于预测与阐释地质活动而言 , 深入理解地球内部结构的精细差别至关重要 。 在这方面 , 深海地质样本的分析为我们提供了宝贵的洞见 。
【潜入深海,揭秘未知!海底沉积层取样机器人技术要点概述】海底采样 , 作为地质调查领域的关键组成部分 , 在推动海洋科学研究方面发挥着至关重要的作用 。 当前 , 海底钻探取样机器人作为新一代海底取样技术的典型代表 , 已在全球范围内得到广泛应用 , 深入海底进行地质取样 。 这一技术不仅在海洋地质调查中占据核心地位 , 还对环境科学研究以及海洋与矿产资源的勘探工作做出了重要贡献 。
图2 代表性海底钻探取样机器人:(a)A-BMS ;(b)RockDrill 2;(c)ROV Drill Mk.2 ;(d)ROV Drill 3;(e)Mebo-200;(f)PROD 5;(g)CRD 100;(h)海牛2号。 来源:Authors Williamson and Associates British Antarctic Survey Cellula Robotics Federal Ministry of Education and Research and Acteon.
海底沉积层取样机器人 , 尤其是海底钻探取样机器人(常简称为海底钻机) , 是高度自动化的设备 , 专用于从海底沉积层中精确采集样本 。 这些机器人通常由海面研究船通过铠装电缆部署至海底 , 并依赖远程操作执行采样任务 。 它们既能在硬岩层中作业 , 也能在软沉积物中轻松提取岩芯样本 , 工作深度可达百米乃至千米以上 。 为确保采样过程的顺畅与样本的完整回收 , 这些机器人配备了钻杆、岩芯筒、套管等多种专业工具 。
采样方法大致可分为海面采样与海底采样两大类 。 海面采样涉及从研究船上延伸出海底沉积层取样机器人 , 使其穿越水柱 , 接触海底 , 并依赖船只或采样器的动力来收集样本 , 随后立即回收至海面 。 大型钻井船常进行长期探索 , 其钻杆无需立即回收 。 相比之下 , 海底采样则是将取样机器人部署至海底 , 主要依赖采样器的智能化完成采样后 , 再进行回收 。 尽管海面采样能通过钻探平台或船只获得更长的岩芯 , 但由于需穿越整个水柱进行采样 , 操作复杂度较高 , 且专用船只成本昂贵 , 导致浅层钻探与单点采样效率不高 。 此外 , 某些采样器如抓斗采样器 , 仅能收集海底表层沉积物 , 且升降过程耗时费力 。
ê5壮粱闳⊙魅似叽蠓掷?
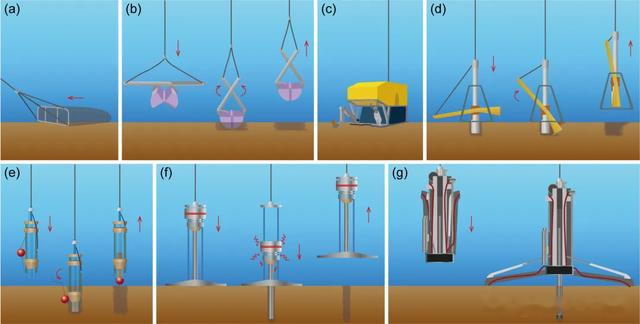
自1970年代英国地质调查局(BGS)开创性地开发并应用了振动取样器以来 , 海底沉积层取样技术便踏上了创新发展的征程 。 此后 , 众多专为探索海洋沉积物与岩石设计的海底沉积层取样机器人应运而生 , 它们基于既往广泛采纳的采样方法 , 可精炼归纳为七大类别 , 如图3所示:
图3 海底沉积层取样机器人的类别及其取样原理:(a)拖网;(b)抓斗;(c)操作手;(d)箱式取样器;(e)穿透器;(f)振动取样器;(g)钻机 。
1.拖网
拖网技术(图4a)涉及将拖网从船只投放至海底 , 随后在目标采样区域进行拖拽采样 。 该技术主要用于回收海洋基石、砾石、粗碎屑及生物样本 。 然而 , 拖网作业面临挑战 , 尤其是在海山区域 , 拖网易被岩石卡住 , 增加了操作的复杂性与危险性 。
2.抓斗
抓斗(图4b)在距海底5-10米处部署 , 操作人员依据甲板上的海底图像确认目标后 , 控制抓斗开合以采集表层样本 。 尽管抓斗在深海资源调查中扮演重要角色 , 但其轻量设计导致姿态不稳 , 样芯易受干扰 , 闭合时的剧烈运动进一步降低了采样成功率 。
3.操作手
操作手(图4c)作为模块化采样器 , 常与遥控潜水器(ROV)协同作业 。 借助ROV的推进、摄像及其他传感器 , 操作人员能精确定位采样目标 。 操作手通过末端执行器的抓握功能 , 实现更精确的样本采集 , 尤其适用于陡坡或垂直表面 。 然而 , 多自由度操作手臂的控制复杂性延长了采样时间 。
4.箱式取样器
箱式取样器(图4d)工作原理类似抓斗 , 但更适用于表层软沉积物采样 , 且对样本的扰动较小 , 保持了良好的原位性能 。 箱体沉入沉积物后 , 通过铲刀封闭 , 有效避免了抓斗操作中的运动干扰 。 其多样形状设计 , 如圆柱或矩形 , 提高了采样的稳定性与效率 。
图4 不同类别海底沉积层取样机器人的原型:(a)岩石拖网;(b)泥土抓斗;(c)操作臂 ;(d)箱式取样器;(e)重力取样器;(f)振动取样器;(g)钻探器:1-PROD 1;2-ROCS钻探系统。 来源:Authors Ifremer Leonard Sussman Tovel Ecospan Environmental Ltd and Williamson and Associates.
5.穿透器
穿透器(图4e)利用自身重量、静水压力与取芯管压差、移动重物或炸药穿透海床 。 为克服随深度增加的摩擦力 , 采用活塞设计减少内壁摩擦 , 确保样芯的均匀回收 。 除炸药外 , 其他穿透器主要适用于松散土壤的浅层采样 , 对坚硬沉积物或岩石则力不从心 。
6.振动取样器
振动取样器(图4f)通过高频振动破坏沉积物粘结 , 实现连续取芯采样 。 其优势在于钻速快、样芯扰动小且环境污染少 , 特别适用于砂层及含砾石黏土层的采样 。
7. 钻探器
钻探器(图4g)作为钻入坚硬地层的利器 , 是现代海底钻探取样机器人的先驱 。 硬质合金或金刚石钻头在进给压力下轻松破碎岩层 , 并通过多段钻管连接 , 实现更深层次的钻探与样芯回收 。 增强冲击功能的钻探器 , 更是显著提升了复杂岩层的破碎能力 。
ê5壮粱闳⊙魅巳⊙际?
海底沉积层取样技术作为海洋科学研究与资源开发的关键手段 , 其重要性不言而喻 。 尽管存在多种类型的海底沉积层取样机器人 , 这些机器人在采样方法上展现出诸多共性 , 同时每种方法又独具特色 , 伴随着各自的优缺点 。 面对研究人员在采样与探索方面的多元化需求 , 选择最合适的采样方法成为确保采样任务成功的关键 , 这一选择直接关联到样品的质量、采集效率、成本效益 , 乃至整个海上作业的成败 。
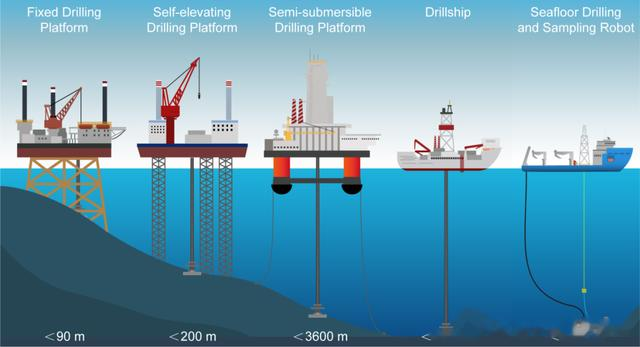
图5 广泛使用的钻探平台和海底钻探取样机器人 。
在深海钻探领域 , 海底钻探取样机器人因其卓越的深度钻探能力而占据重要地位 , 与海上钻井平台共同构成了深层钻探采样的两大主力 。
海上钻井平台根据机动性可分为固定式、移动式和浮动式 , 这些大型结构主要用于海上石油开采 , 通过不同的锚定方式适应各种水深 。 相比之下 , 海底钻探取样机器人则展现出更高的灵活性 , 它能够从海面支援船部署至海底 , 直接在海底进行钻探作业 , 有效减少了风浪等外界因素的影响 , 提高了钻探的精确度和及时性 。 此类机器人在钻井平台选址、海底锚固系统铺设、管道/电缆埋设及环境基线调查等方面具有广泛应用 。
图6 钻井船与海底钻探取样机器人的优缺点
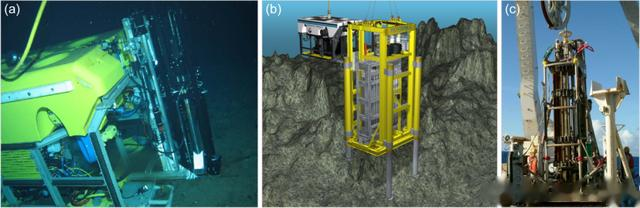
根据巡航能力和能量来源的不同 , 海底钻探取样机器人进一步细分为固定式和移动式 。 固定式机器人依赖脐带电缆供电和远程控制 , 而移动式机器人则通常安装在ROV(遥控无人潜水器)上 , 由ROV提供导航、数据传输和能量支持 。 特别是基于ROV的钻探系统 , 将固定式机器人的采样能力与ROV的巡航能力相结合 , 实现了根据地质条件灵活调整采样点的多点采样 , 为海底矿产资源勘探和岩土工程调查提供了更为经济和便捷的数据采集手段 。
图7 固定式和可移动式海底钻探取样机器人:(a)基于ROV的集成钻探机器人(ROCS钻探系统);(b)不完全集成的基于ROV的钻探机器人(ROV Drill 3);(c)固定式海底钻探取样机器人(BMS-1) 。 来源:Authors.
在取样方法上 , 当前的海底钻探取样机器人主要采用提钻取芯和绳索取芯两种方式 。 提钻取芯需要逐一拆卸钻杆以提取岩芯样本 , 而绳索取芯则通过打捞器直接提升芯管 , 减少了钻具处理步骤 , 提高了钻探效率和岩芯保护效果 。 在深海作业中 , 由于操作时间的长短直接影响任务风险和研究成本 , 因此绳索取芯技术因其高效、低扰动的特点而得到了更广泛的应用 。
图8 两种取芯方法的操作比较:(a)提钻取芯;(b)绳索取芯 。
图9 提钻取芯与绳索取芯的优缺点
ê5壮粱闳⊙魅斯丶际?
从最初的概念构想到最终的实验验证 , 海底沉积层取样机器人的研发历程是一个极为漫长且资源耗费巨大的过程 。 这一过程中的每一步——涵盖设计构思、生产制造、控制系统开发、严格测试以及保真技术实施——均承载着严苛的技术标准 , 它们是多学科交叉与多种技术深度融合的结晶 。 要确保机器人在无人深潜的极端环境下 , 能够稳定获取高品质的岩芯样本 。 涉及一系列核心关键技术 , 可精炼归纳为四大领域:机构和制造、自动控制、地面验证及样本保真 。
机构和制造方面 , 重点在于机构设计和材料选择 。 机构设计需确保采样过程的可靠性 , 减少组件复杂性 , 提高适应性和任务可靠性 , 如变胞采样机构的考虑 。 材料选择则要求机器人具备高耐压性、抗腐蚀性、低温耐受性和电磁隔离性 , 常用材料如钛合金及特种涂层技术 , 同时需考虑成本、重量和可加工性 。
自动控制方面 , 关键技术涵盖地质分析、远程操作和自主决策 。 地质分析通过原位地质分析和声学传输实时获取地质数据 , 减少地面研究依赖 。 远程操作依赖传感器进行姿态定位、环境感知和数据通信 , 确保操作员准确操控 。 自主决策使机器人能灵活应对环境变化 , 减少潜在风险 , 尽管仍依赖持续通信下的人为决策 。
地面验证方面 , 包括标准大气环境、静水环境和浅海环境下的测试 。 标准大气环境下的测试全面评估机器人的运动和功能性能 。 静水环境测试评估机器人的运动稳定性和电子设备密封性 。 浅海环境测试则提供更接近实际深海条件的反馈 , 评估机器人在动态水流中的稳定性、机动性和适应性 。
样本保真方面 , 关注分层维护、压力-温度维护及光/氧气维护 。 分层维护确保获取分层的海底岩石并保留地层细节 。 压力-温度维护通过压力-温度取样工具保持样本原位特性 。 光/氧气维护则保持样本的原位光强和氧浓度 , 以保留其成分和特性 。
ê5壮粱闳⊙魅思际跄训?
海底沉积层取样技术作为深海探索的重要手段 , 在过去的几十年里取得了显著的进步 。 但与此同时 , 海底沉积层取样机器人在开发和采样过程中面临诸多挑战和限制 。 这些限制主要可以概括为两大类:陆地技术的局限性 , 还来自深海环境的恶劣性限制 。
在陆地技术限制方面 , 首先面临的是密封与泄漏问题 。 由于深海环境的特殊性 , 海底沉积层取样机器人必须具备出色的防水和防泄漏能力 , 以保护其内部的机电系统和样本免受海水的侵蚀 。 这不仅是为了确保机器人的正常运行 , 更是为了保持样本的原位特性 , 防止因泄漏而导致的污染 。 此外 , 通信与控制也是一大技术难题 。 在水下环境中 , 通信和控制变得异常复杂 , 主要依赖脐带电缆或声波通信 。 然而 , 这种方式存在距离和干扰限制 , 严重影响了对机器人的实时监测和控制 。 最后 , 能源与能耗问题也是不容忽视的 。 深海无法利用太阳能等可再生能源 , 机器人只能依赖脐带电缆供电 。 这不仅增加了机器人的体积和能耗 , 还限制了其采样性能 。
图10 海底地形概览
在海洋环境限制方面 , 首先面临的是极端压力问题 。 深海压力巨大 , 对机器人的强度和抗压性提出了极高的要求 。 如果机器人无法承受这些压力 , 设备将很快失效 。 同时 , 高压海水还会加剧电化学腐蚀 , 对机器人的金属材料构成严重威胁 。 其次 , 严重腐蚀也是一大挑战 。 深海环境复杂多变 , 富含各种活跃离子 , 这些离子易与金属发生反应 , 导致金属溶解和加速腐蚀 。 此外 , 微生物的附着也会进一步加剧腐蚀过程 , 对机器人的完整性构成严重威胁 。 最后 , 严苛的地形也是一大限制因素 。 海底地形复杂多变 , 不稳定 , 这对机器人的支撑结构和传感系统提出了极高的要求 。 机器人必须具备出色的适应能力和稳定性 , 才能在不同地形下进行有效采样 。
ê5壮粱闳⊙魅朔⒄骨魇?
在发展趋势方面 , 海底沉积层取样机器人正面临着前所未有的发展机遇 , 其发展前景广阔且充满希望 。
短期内 , 该领域的核心发展策略聚焦于采样技术的革命性突破与操作性能的显著提升 , 力求打造出更为尖端、高效的海洋探索利器 。 具体而言 , 近期的奋斗目标集中在采样技术的全方位革新上 , 这包括研发便携式采样装置、多样化采样器具、灵活的探测方式以及采样区域的大幅扩展 。 这些创新不仅极大地提高了采样的精准度和效率 , 更使得对深邃、辽阔且复杂的海底地形进行探索成为可能 , 从而极大地扩展了人类对海洋的认知范围 。 与此同时 , 通过持续优化机器人的操作性能 , 比如增强作业深度、采用智能采样策略、提升环境感知能力以及精细样本保存等 , 海底沉积层取样机器人的实用价值和科学贡献得到了显著增强 。
而长期来看 , 发展目标则瞄准了更为宏伟的蓝图 , 即构建全球性的海洋资源网络、发展深海基础设施以及助推海底机器人产业的蓬勃发展 。 随着人类对深海资源认识的日益深入 , 全球海洋资源网络的建立将有力推动资源的保护与合理利用 , 并加强国际间的合作与信息交流 。 深海基础设施的不断完善将为深海资源的开发和科学研究提供坚实的后盾 , 而海底机器人产业的崛起则将不断推动海洋技术的创新与应用 , 降低传统人工操作的风险与成本 , 提升海洋作业的智能化程度和整体效能 。
在技术创新与性能优化的双重引擎驱动下 , 海底沉积层取样机器人正步入一个更为宽广的发展空间和应用领域 。 展望未来 , 随着技术的持续进步和应用的不断深化 , 海底沉积层取样机器人必将在海洋资源勘探、科学研究以及水下监测等关键领域发挥更加举足轻重的作用 , 为揭开海洋的神秘面纱、保护海洋生态环境以及促进海洋经济的可持续发展贡献出不可估量的力量 。
参考文章
https://onlinelibrary.wiley.com/doi/10.1002/rob.22433
推荐阅读














- \uD83D\uDD25 揭秘:嵌入式大佬如何用一行代码搞定面试?
- 购物节来袭,手机市场暗潮涌动,超值机型即将揭秘!
- RTOS系统:揭秘专业精确的核心用途!
- 三款迭代标准版新机均在路上:续航已揭秘,核心配置也已清晰!
- vivo新机亮点揭秘:超声波指纹+骁龙8 Gen4,还有120W快充
- 为何用户宁愿花钱装电信,也不用移动的免费宽带?揭秘卡顿原因!
- 揭秘手机顶部‘HD’标志:VoLTE高清语音通话功能全解析
- 揭秘最为知名的黑客工具之一:Cain and Abel(密码破解)
- 【揭秘!】苹果手机中日售价大不同,背后竟有这些秘密!
- 揭秘好屏工厂,维信诺探厂见证中国好屏