
文章图片
【灵巧堪比人手?广东工业大学团队提出新型模块化刚柔耦合仿人手】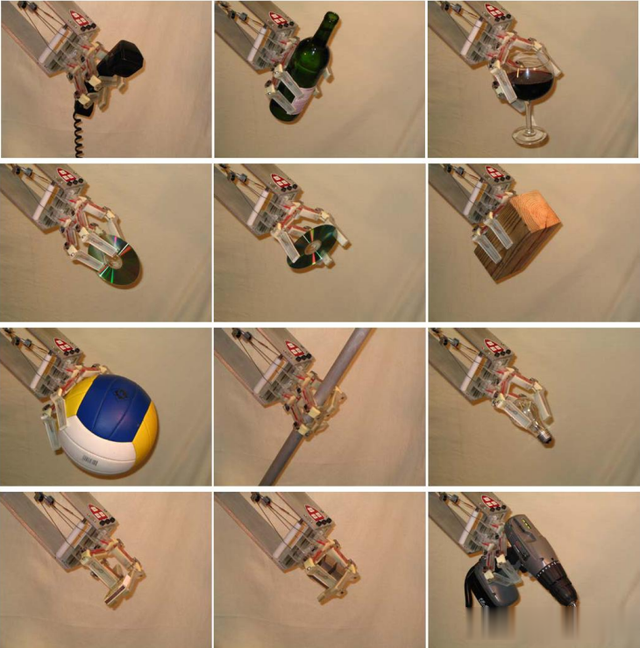
文章图片
文章图片
文章图片
文章图片
文章图片

人如果没有了双手 , 将会面临怎样的挑战?
基本生活技能严重受限、沟通能力下降、工作能力手续先、创造力受限……
灵巧双手作为人体中功能最多的器官之一 , 不仅是人类使用工具的重要基础 , 更为人类提供了适应环境和制造工具的能力 。
对于人形机器人而言 , 亦是如此 。
仿人多指手作为人形机器人的关键组成部分 , 不仅可提升机器人的交互体验 , 还能增强其功能性 , 助力机器人完成各种复杂任务 。
近两年 , 得益于人形机器人的飞速发展 , 仿人多指手的研究也逐渐成为行业热点 , 受到颇多关注 。
那么 , 仿人多指手的研究进度究竟是处于何种程度呢 , 又是否能够做到像人手一样灵巧?
ㄉ杓铺粽剑喝耸諺S仿人多指手
人手拥有27块骨头、34个关节和100多块肌肉 。 得益于这一复杂的骨骼和肌肉系统 , 人手能够进行穿针引线等各种精细和复杂的动作 。
然而 , 对于仿人多指手而言 , 过于复杂的结构不仅会增加成本 , 不利于大规模应用和商业化 。 同时 , 结构越复杂可能出故障的点也就越多 , 会影响到其可靠性和耐用性 , 并带来后续的制作材料、制作工艺、制作成本和后续维护等一系列问题 。 此外 , 仿人多指手的设计还需考虑人形机器人手臂的承重能力以及结构复杂带来的能效比问题 。
因此 , 模仿人手的简易性与功能性之间的矛盾 , 成为仿人多指手研究设计与实际应用中的核心问题 。
一般来说 , 仿人多指手的主要包括刚性结构和柔性结构两大类别 。
刚性结构下的人形多指手可以模仿人手的形态、结构和功能 , 其构造简单、成本低 , 耐用 , 需要的维护较少 。 也因此 , 传统的仿人多指手主体结构多为刚性结构 。 该结构的仿人多指手多采用传统的电机、气缸、液压缸等作为驱动器 , 通过齿轮、带轮、连杆、传动轴等一系列复杂的传动系统对仿人指关节施加驱动力 , 实现指关节的长距离驱动 。 这种刚性结构的多指手虽然功能强大 , 但存在结构复杂、对外界环境的适应性差、安全性不高等缺点 , 在实际应用中往往需要复杂的驱动控制 。
柔性结构的仿人多指手则能够模拟人手的自然运动和抓握方式 , 提供更广泛的运动范围和更精细的操作能力 , 并与人类协作 , 减少意外伤害的风险 。 例如 , 柔性仿生手指关节的触觉力/角度感知能力 , 可以完全贴合载体 , 同时实现手指指尖触觉力和关节角度两个物理量测量 。 该结构下的柔性仿生手通常使用柔性材料 , 并集成有柔性传感器 , 这些传感器能够检测轻微的触摸和压力变化 , 提供类似于人类触觉的感知能力 。 但柔性结构的设计复杂性大大提升 , 成本也显著增长 , 且柔性材料的集成和控制更具挑战性 , 需要更频繁的检查和维护以确保其性能 。
如何平衡制作材料的刚性和柔性之间的矛盾亦然已成为仿人多指手研究设计与实际应用中的另一个重要课题 。
ǜ杖狁詈希禾岢鲂滦湍?榛氯硕嘀甘?
针对以上两个问题 , 此前曾有多个科研团队积极探索刚柔结合的机械结构设计 , 并提出了一种“将柔性关节与刚性关节巧妙结合的刚柔耦合手指”的创新方案 , 以克服传统设计的局限性 , 在两者之间达到理想的平衡状态 。
例如 , 为了降低柔性关节的弯曲刚度 , 有研究团队创新性提出了一种由矩形和波浪形圆形柔性关节构成的复合手指结构 。 这一设计虽在理念上颇具创新 , 但在材料选择与结构优化层面仍存在不足 , 且柔性关节的变形能力也相当有限 , 这限制了其广泛应用 。
此外 , 也有团队提出了另一种采用气动技术增强软执行器刚度的方法 。 这一方法通过精确调控填充腔体粒子结构与加压方式 , 实现了软结构刚度在一定范围内的灵活调整 , 为软体机器人的发展开辟了新路径 。
但值得注意的是 , 以往关于刚柔耦合结构的研究大多聚焦于新设计方法的提出 , 并依赖商业有限元软件进行初步的静力学分析与模拟验证 , 忽视了理论模型在实际工程环境中的深入剖析 。 以刚柔耦合抓取为例 , 多数研究仅侧重于欠驱动结构与抓取对象间理论模型的构建 , 缺乏与实践的紧密结合 。
对此 , 来自广东工业大学机电工程学院仿生与智能机器人实验室与广东富力盛仿生机器人有限公司的研究人员强强联合 , 从仿生学角度出发 , 对刚柔耦合仿生多指手结构进行设计 , 并提出了一种集手指与手掌于一体的新型模块化刚柔耦合仿人多指手 , 可通过刚柔耦合手指结构中的柔性关节发生显著变形来实现动作 。
该设计不仅模仿了真实人手的尺寸 , 还基于梁约束模型理论 , 构建了链式刚柔手指结构的力学模型 , 充分考虑了缆绳摩擦力对系统性能的影响 , 实现了对绳驱动刚柔耦合手指的精准分析 。 为验证所建力学模型的准确性 , 研究团队开展了一系列有限元仿真与实物试验 , 就该模型的可靠性进行验证 。
此外 , 他们还全面评估了刚柔耦合仿生手的各项性能指标 , 包括最大屈曲幅度、最大屈曲力以及实际抓取能力 , 充分展示了所提设计方法的可行性与高效性 , 为机械手在柔性作业领域的应用提供了极具潜力的替代方案 。
D馊耸郑耗?榛峁故迪指丛佣?
研究团队提出新型人形手设计 , 不仅在结构上模拟了人手的复杂动作 , 还在材料与控制系统上实现了高度的创新与集成 。
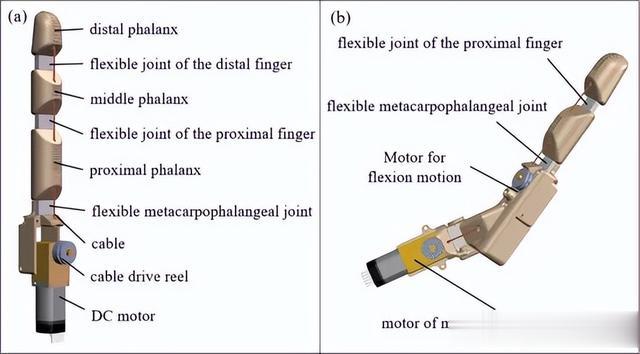
具体来说 , 其手指的结构设计融合了刚性和柔性材料 , 通过柔性关节与刚性指骨的结合 , 实现了类似人类手指的屈曲运动 。 手指关节长度设定为5至6毫米 , 不仅遵循了人手的解剖学尺寸 , 而且通过线缆驱动手掌基座电机的方式 , 实现了单个自由度的精确控制 。 食指、中指及无名指在形状和尺寸上保持一致 , 以便于模块化组装 , 而尾指则略小以适应其功能需求 。 拇指则拥有两个自由度 , 模拟了复杂的屈曲运动及腕掌关节(CMC关节)的功能 。
刚柔结合的手指示意结构 , 包括食指(a)和拇指(b) 。
手掌的设计包括掌根、掌前壳与掌背壳 , 亦均按照实际人手的位置布局进行设计 , 确保各手指能在掌心合理摆放 。
人形多指手的手掌 。 (a)3D模型;(b)实际组装图 。
在材料选择上 , 研究团队采用了两种可3D打印材料:刚性部分选用了高刚度、不易变形的热塑性聚乳酸材料;而柔性部分则采用了弹性好、恢复性强的热塑性聚氨酯材料 , 其肖氏硬度为85A , 弹性模量介于20至26MPa之间 。 这种材料组合不仅便于制造 , 还能有效模拟人手的力学特性 。
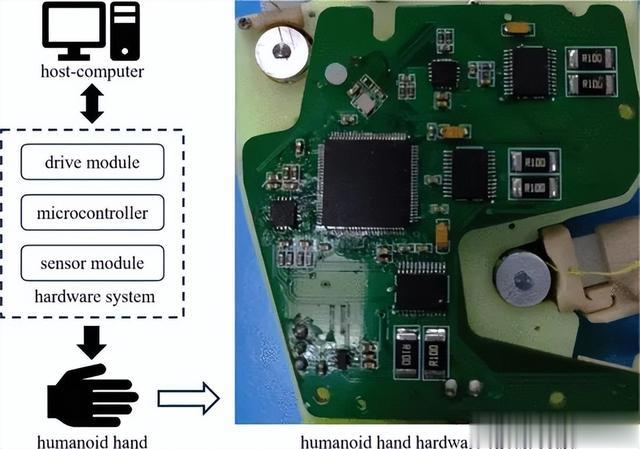
人形手的控制系统 。
控制系统则紧密集成于手掌内部 , 电路板尺寸与手掌完美匹配并固定其中 。 通过专用驱动模块控制六个直流齿轮电机的运动 , 同时利用传感器模块监测电机的速度、位置和电流信息 , 由微控制器进行数据处理 。 此外 , 为了提升交互式控制的便捷性 , 研究团队还开发了主机软件 , 该软件能够实现主机与微控制器间的通信 , 实时显示每个手指的运动状态 , 并传输控制指令 。
ń7治觯菏P涂煽啃匝橹?
为了证明线缆驱动的刚柔耦合手指结构数学模型的可靠性和准确性 , 研究团队以梁约束模型为基础 , 采用了串联的铁木辛柯梁约束模型来分析柔性关节的变形 , 并作为表示刚柔耦合手指结构的合适框架 。
A. 机械建模
研究团队为刚柔耦合手指结构引入了数学模型 , 该模型基于静态分析的串联铁木辛柯梁模型 。 与传统串联梁结构不同 , 研究团队的设计在每对梁元素间引入了刚性指骨 , 形成了链条结构 。 每个部分都包含一个梁元素和一个刚体元素 。 通过离散化手指结构为多个端到端连接的耦合单元 , 并结合串联梁模型 , 研究团队可以系统地求解刚柔耦合手指在不同载荷下的数学模型 。
刚柔单元的链式梁约束模型 。
B. 力学分析
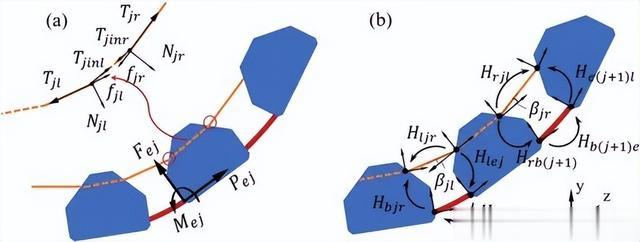
考虑到线缆驱动和摩擦对刚柔耦合手指结构的影响 , 研究团队将数学模型与线缆驱动条件下的力分析相结合 。 通过整合公式与线缆绞盘方程 , 研究团队可以确定线缆对刚性指骨的力传递到梁元素末端时产生的力矩 。
静态分析 。 (a)电缆在手指中的受力分析;(b)电缆进出端方向分析 。
C. 仿真验证
利用Abaqus有限元软件对刚柔耦合手指结构进行仿真计算 , 研究团队就数学模型的准确性进行了验证 。 仿真涉及对不同数量的刚柔耦合元素进行有限元分析 , 并在不同线缆驱动力的影响下进行 。
D. 实验验证
为了进一步验证数学模型的准确性 , 研究团队建立了实验平台 , 对线缆驱动的刚柔耦合手指结构进行了系统比较和验证 。 实验过程中 , 记录了不同线缆驱动力下手指结构的变形运动信息 , 并与数学模型和有限元仿真计算进行了对比 。 通过分析指尖点的距离误差 , 证明了所建立的数学模型具有高精度和良好的准确性 。 误差来源主要包括柔性材料的非线性超弹性、线缆驱动过程中的非线性摩擦以及3D打印制造工艺的不稳定性 。
索驱动刚柔手指实验平台 。
ㄐ阅芷拦溃焊杖狁詈戏律质笛橛氩馐?
为了全面评估刚柔耦合仿生手的各项性能指标 , 研究团队还进行了一系列实验 。
A. 基础性能测试
刚性-柔性耦合手指结构的性能与所使用的线缆驱动直流齿轮电机的性能密切相关 。 实验中 , 研究人员将电机设置在特定条件下工作:负载转速65转/分钟 , 工作电压12伏 , 堵转电流0.5安 , 平均扭矩0.3牛·米 。
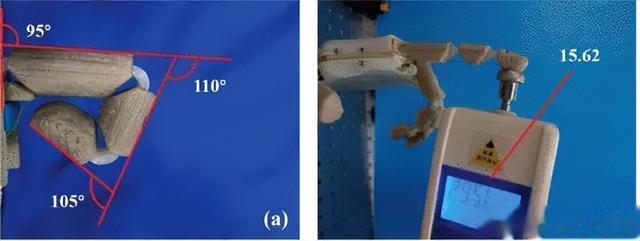
刚性-柔性手指性能测试:(a) 最大弯曲;(b) 按压力测试 。
测试显示 , 手指结构在进行最大范围弯曲时 , 需约8.6牛的最大弯曲张力 。 此外 , 通过电机驱动 , 研究团队还对手指结构进行了基础性能测试 。 上图(a)展示了手指的最大弯曲状态 , 此时 , 近端、中端和远端柔性关节均可弯曲超过90度 。 同时 , 使用数字张力计评估了手指的最大按压力 , 上图(b)所示 。 在初始弯曲状态下 , 电机通过线缆在手指末端施加压力 , 五次测试的平均压力约为15.6牛 。。
B.抓取实验
戴手套的人形手(左)与人类手(右)的对比图 。
研究团队还对人形手进行了抓取实验 。 为了增加摩擦力 , 在实验前 , 研究人员给人形手戴上了手套 。 上图展示了戴手套的假肢手与人类手的对比 。 从下图可以看出 , 研究团队所设计的刚柔耦合人形手能够基本完成各种抓取分类测试 , 这表明它在一定程度上能模仿人类手的抓取功能 , 并具备抓取日常物品的能力 。
人形手的抓取实验 。
推荐阅读













- 4299起!首款次世代新旗舰发布:300万跑分无敌性能+影像堪比单反
- “中国芯片之父”弃美回国,轮到美被“垄断”!作用堪比核武器
- 老人手机推荐,为家中长辈挑选手机,1500元以上价位的五大推荐!
- 个人手机充电统计报告,123次充电记录,平均每次只充27.66%的电
- 小米15 Pro较详细功能配置曝光,超长寿命堪比iPhone!
- “芯片之父”邓中翰,手握3000专利弃美回国,作用堪比核武
- 不要把小命掌控在别人手里
- 2024年最值得买的3款千元机,性能强,配置堪比旗舰,有你喜欢的吗
- 1099起!红米新一代小金刚Note14系列发布:豪华配置堪比旗舰!
- 轮到美被“垄断”了,“芯片之父”弃美回国,研发成果堪比核武